
[투어코리아=김교환 기자] 울산과학기술원(UNIST) 연구진이 로봇이 사람의 손길을 읽고 감정을 자연스럽게 드러낼 수 있도록 하는 기술 두 가지를 개발해 국제 학술대회에서 선보였다. 디자인학과 이희승 교수팀의 성과로, 각각 별도 논문으로 작성돼 지난 6월 1일부터 5일까지 오스트리아 빈에서 열린 국제로봇자동화학술대회(ICRA)에서 발표됐다. ICRA는 국제전기전자공학자협회(IEEE) 산하 로봇자동화학회(RAS)가 주관하는 로봇 분야 최고 권위 학술대회 중 하나다.
첫 번째 연구는 소셜 로봇이 사람의 손길에 담긴 감정과 의도를 보다 정확하게 파악하도록 돕는 터치 인식 기술이다. 기존 기술의 약점은 사람마다 손 크기, 힘의 세기, 움직임 속도가 달라 동일한 행동도 로봇 입장에서는 다른 신호로 읽힌다는 점이었다. 이를 해결하기 위해서는 촘촘한 촉각 센서나 복잡한 장치가 필요했고, 이는 소형 로봇이나 저전력 환경에선 적용하기 어려웠다.
연구팀은 음성 인식 분야에서 쓰이는 MFCC 기법에서 실마리를 찾았다. 사람마다 목소리가 달라도 말소리의 공통 주파수 특징을 뽑아내는 이 방식을 터치 신호에 맞게 변형해, 손길마다 반복적으로 나타나는 리듬과 진동 패턴을 추출하도록 했다. 터치 신호는 음성보다 주파수 범위가 좁고 낮은 대역에 정보가 집중돼 있어, 음성용 기준을 그대로 쓰지 않고 정전식 터치센서 특성에 맞는 새 기준을 별도로 설계했다.
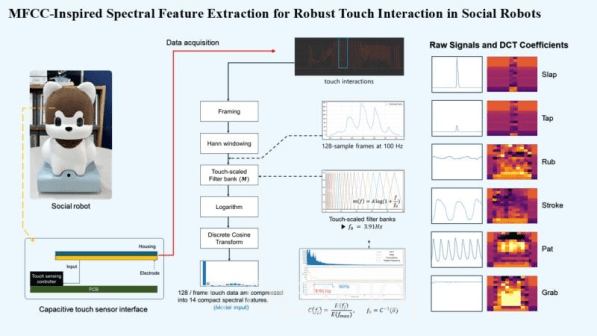
소셜 로봇 'PO-ME'의 이마에 정전식 터치 전극을 부착하고 참가자 15명이 가볍게 치기, 톡 두드리기, 문지르기, 쓰다듬기, 손바닥으로 두드리기, 잡기 등 여섯 가지 손길을 수행한 실험에서 이 기술은 약 94%의 정확도를 기록했다. 마이크로컨트롤러 환경에서 한 프레임당 처리 시간은 164마이크로초(㎲)에 불과해 경량 로봇에도 적용 가능한 수준임을 확인했다. 제1저자인 김지수 연구원은 "복잡한 촉각 장치 없이 정전식 터치센서만으로 손길의 차이를 구분할 수 있게 됐다"고 설명했다.
두 번째 연구는 로봇의 감정 표현을 더 생동감 있게 만드는 기술이다. 기존 로봇들은 기쁨이든 슬픔이든 감정을 표현할 때 고정된 강도로 움직여 기계적인 인상을 줬다. 연구팀은 로봇의 감정 동역학 모델에 감쇠비(Damping Ratio)를 조절하는 방법을 적용해 움직임의 과장 정도를 5단계로 세밀하게 제어할 수 있게 했다.
분노·혐오·공포·행복·슬픔·놀람 등 6가지 기본 감정을 각각 5단계 강도로 표현하게 한 뒤 참가자 22명이 생동감과 자연스러움을 7점 척도로 평가한 실험에서 흥미로운 결과가 나왔다. '놀람'은 강하게 표현할수록 생동감과 자연스러움이 뚜렷하게 높아진 반면, '혐오'는 중간 강도에서 가장 자연스럽게 받아들여졌고 지나치게 강하면 오히려 자연스러움이 떨어졌다. 감정마다 최적의 표현 강도가 다르다는 사실이 실험으로 확인된 셈이다. 이 연구의 제1저자는 박하은 박사다.
이희승 교수는 "손길을 알아차리는 능력과 감정을 상황에 맞게 표현하는 능력이 함께 갖춰져야 소셜 로봇이 사람과 진정으로 자연스럽게 교감할 수 있다"며 "이번 연구가 돌봄 로봇, 교육용 로봇, 반려 로봇 등 사람과 가까이 지내는 로봇을 더 친근한 존재로 만드는 데 기여할 것"이라고 말했다. 이번 연구는 산업통상자원부와 과학기술정보통신부의 지원으로 수행됐다.



