
취리히 연방 공과대학(ETH Zurich)에서 분사한 우주 로봇 스타트업 오르빗 로보틱스가 우주 공간에 최적화된 파격적인 형태의 로봇 프로토타입 ‘헬리오스(Helios)’를 전격 공개했습니다.
AI포스트 핵심 요약
- ✅ [인간형 고정관념 깬 무다리·네 팔의 우주 맞춤형 아키텍처] 헬리오스는 무중력 공간에서 균형을 잡는 것이 무의미하다는 진단 하에 다리를 완전히 배제함. 미세한 움직임에도 공중에 뜨는 우주 정거장 내부에서 한 쌍의 팔은 선체 표면 고정용으로, 나머지 한 쌍은 화물 하역 및 장비 이동용으로 활용하는 상호 보완적 자율 조작을 구현함.
- ✅ [모터를 어깨로 몰아넣은 초정밀 ‘힘줄 구동’과 롤링 관절 혁신] 팔 끝부분의 무게를 최소화하기 위해 모든 모터를 어깨 부근에 집중 배치하고 케이블·풀리로 힘을 전달하는 ‘힘줄 구동(Tendon-driven)’ 시스템을 채택함.
- ✅ [우주비행사 시급 2억 원의 비효율 제거... 인간은 고부가가치 연구에만 집중] 현재 국제우주정거장(ISS) 승무원들은 시간의 35%를 단순 유지 보수에 소모하며, 우주선 1대 하역에만 50시간을 허비함.
인간과 똑같이 생긴 두 팔과 두 다리를 가진 휴머노이드 로봇이 지구상의 산업·물류 현장을 혁신하는 사이, 우주로 눈을 돌린 엔지니어들은 전혀 다른 차원의 신체를 가진 기계를 탄생시켰다.
미세 중력 환경에서 작동하려면 중력 환경을 고려한 설계를 완전히 버려야 한다는 게 연구진의 기술적 전제였다. 취리히 연방 공과대학(ETH Zurich)에서 분사한 우주 로봇 스타트업 오르빗 로보틱스(Orbit Robotics)는 우주 공간 및 궤도 정거장 내부 작업에 완벽히 최적화된 로봇 프로토타입 ‘헬리오스(Helios)’를 공개했다.
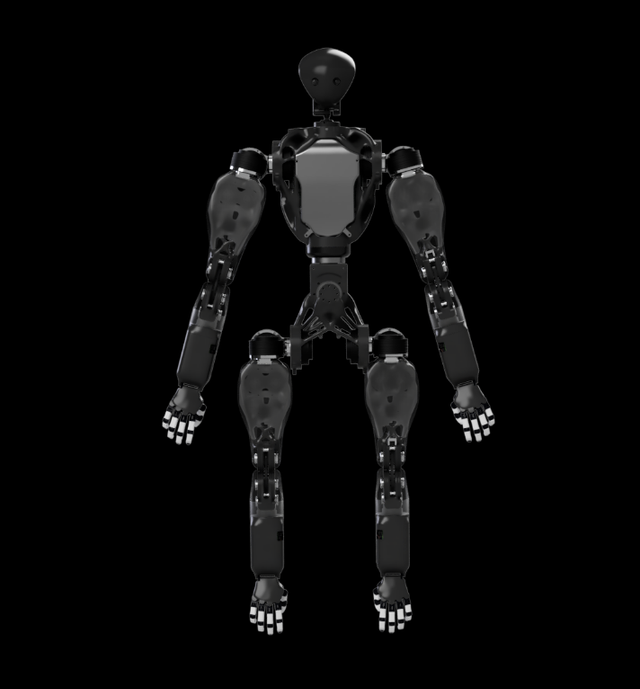
헬리오스의 외형은 지구용 인간형 로봇의 고정관념을 완전히 깬다. 다리가 없고 오직 네 개의 팔만 달려있다. 오르빗 로보틱스 연구진은 무중력 상태에서는 걷는다는 것 자체가 불가능하고 균형을 잡는 것도 무의미하다고 진단했다.
우주 공간에서는 미세한 움직임만으로도 공중으로 붕 뜨기 때문에, 두 다리 대신 표면을 완벽히 움켜쥐고 지탱해 줄 또 다른 '팔'이 필수적이라는 결론이다. 이에 따라 헬리오스는 한 쌍의 팔로 로봇 자신을 우주 정거장 내부 표면에 단단히 고정하고, 동시에 나머지 한 쌍의 팔로는 화물을 하역하거나 장비를 이동하는 등 상호 보완적인 자율 작업을 안정적으로 수행해 낸다.
어깨에 모터 몰아넣고 ‘힘줄’로 구동…미세 중력 맞춤형 초정밀 관절
헬리오스의 네 팔은 지구상의 일반적인 산업용 로봇처럼 각 관절마다 무거운 모터를 장착하는 방식을 과감히 탈피했다. 움직이는 팔 끝부분의 무게를 최소화하기 위해 모든 모터를 어깨 부근에 집중 배치하고, 케이블과 풀리를 통해 힘을 전달하는 이른바 '힘줄 구동 시스템(Tendon-driven)'을 채택했다.


동작 범위를 희생하지 않으면서도 로봇의 무게와 민첩성을 극대화한 핵심 혁신이다. 특히 팔꿈치 관절에는 부드럽고 마찰이 적은 움직임을 구현해 주는 '롤링 컨택트(Rolling Contact)' 관절을 통합했다. 이는 지구에선 사소해 보일지 모르지만, 미세 중력 환경에서는 로봇의 성패를 가르는 치명적인 디테일이다.
무중력 공간에서 로봇이 갑작스럽게 기계적인 충격이나 진동을 발생시키면 로봇 기체 자체는 물론, 로봇이 들고 있는 수천만 달러짜리 우주 장비 전체의 균형을 순식간에 무너뜨려 대형 사고로 이어질 수 있기 때문이다.
오르빗 로보틱스는 헬리오스 개발에 앞서 원격 조종과 모방 학습, 양팔 조작을 위한 초기 테스트베드 플랫폼인 '이카루스(IKARUS)'를 단 두 달 만에 구축해 축적한 엔지니어링 접근 방식을 이번 헬리오스에 고스란히 이식했다.
시간당 14만 달러의 노동 비용…우주비행사 '몸값' 아끼는 구원자
오르빗 로보틱스가 이 복잡하고 정교한 네 팔 로봇을 개발한 궁극적인 목표는 우주비행사를 대체하는 것이 아니라, 그들의 어깨를 짓누르는 단순 반복 작업의 족쇄를 풀어주는 것이다. 현재 국제 우주 정거장(ISS)에서 우주비행사들이 보내는 전체 시간의 무려 35%는 기계적인 일상 유지 보수와 보급품 분류에 쓰이고 있다.
우주선 한 대가 들어왔을 때 하역 주기에만 승무원의 시간 50시간이 통째로 사라진다. 우주비행사 1인당 고용 및 유지에 소요되는 시간당 노동 비용이 약 14만 달러(한화 약 2억 원)에 육박하는 것을 감안하면, 엘리트 과학자들이 상자를 옮기고 창고를 정리하는 데 막대한 예산이 소요되고 있는 셈이다.
헬리오스는 이 비효율을 해결하기 위해 설계됐다. 복잡하고 철학적인 결정을 내릴 필요 없이, 좁은 통로를 이동하고 무중력 상태에서 완벽하게 균형을 유지하며 물체를 정밀하게 조작하는 임무만 전담한다.

로봇이 이 반복적인 물류 및 유지 보수 작업을 통째로 넘겨받으면, 인간 우주비행사들은 미세 중력 환경에서 오직 인간만이 할 수 있는 고부가가치 과학 연구에 온전히 집중할 수 있게 된다.
“환경이 신체를 결정한다”
스페이스X의 스타십 프로그램 등으로 인해 우주 발사 비용이 사상 전례 없는 속도로 폭락하면서, 민간 궤도 정거장과 상업용 우주 거주 시설의 수는 폭발적으로 증가할 전망이다. 이에 따라 화물 관리와 위성 서비스, 우주 건설을 담당할 자율 로봇의 시장 규모도 기하급수적으로 커지고 있다.
이와 동시에 우주 방사선 손상, 치명적인 골밀도 감소, 시력 장애, 뇌 체액 변화로 인한 인지 기능 저하 등 우주 환경이 인체에 미치는 끔찍한 부작용의 과학적 증거들 역시 쏟아지고 있다.
방위 산업 최전선에서 인간 대신 진흙탕을 누비는 미국의 전투용 휴머노이드 '팬텀'처럼, 우주 개척지에서도 위험 부담과 비용이 절망적으로 높은 유인 우주 비행의 타당성은 새로운 대안을 요구받고 있다. 오르빗 로보틱스는 헬리오스를 우주비행사의 든든한 동반자로 소개하며 선을 긋고 있지만, 이들이 던진 하드웨어의 파격은 전 세계 테크계를 향해 무서운 질문을 남긴다.
작동하는 환경에 맞춰 다리를 버리고 네 팔을 달아야만 완벽한 효율을 낼 수 있다면, 과연 연약한 인간의 신체는 우주 영토 확장이라는 극한의 인프라 환경에 가장 적합한 도구인가라는 것이다. 미·중의 방산 휴머노이드 전쟁에 이어, 이제 우주 공간마저 인간의 외형을 탈피한 환경 특화형 자율 로봇들의 기술 실증 무대로 빠르게 전환되고 있다.
Copyright ⓒ AI포스트 무단 전재 및 재배포 금지



