
사고나 질병 등으로 팔을 잃어 인공 팔이 필요한 사람들을 위해, 국내 연구자가 주도한 국제공동연구팀이 로봇으로 맞춤형 인공 팔을 미리 체험하고 선택할 수 있는 기술을 개발했다. 이 기술로 사용자에게 더 가볍고 효율적인 맞춤형 의수(義手) 설계가 가능해질 전망이다.
광주과학기술원(GIST, 총장 임기철)은 AI융합학과 강지연 교수가 이끈 한-미 공동연구팀이 어깨부터 손까지의 움직임을 고려해 개인에게 맞는 상지(上肢·어깨부터 손까지를 포함한 팔 전체) 의수 설계를 지원하는 로봇 기반 의수 체험 시스템 ‘I-PEDLE(Intelligent Prosthesis Emulator for Daily Living Enhancement)’을 개발했다고 밝혔다. 이 시스템은 여러 방향으로 자유롭게 움직일 수 있는 구조를 갖춘 것이 특징이다.
이 기술은 다양한 의수의 움직임을 로봇으로 구현해 사용자가 직접 체험할 수 있도록 하고, 그 결과 데이터를 바탕으로 개인에게 적합한 맞춤형 의수 구성을 제안한다. 상지가 절단된 환자를 위한 고기능 의수 기술은 지속적으로 발전하고 있지만, 무게 부담과 복잡한 제어 방식, 높은 비용 등의 한계로 실제 사용자 만족도는 여전히 낮은 편이다.
특히 많은 상용 의수는 능동적인 손목 기능이 부족해 이를 보완하기 위해 어깨나 팔꿈치를 과도하게 사용하는 움직임이 나타날 수 있으며, 이러한 동작이 반복될 경우 장기적으로 근골격계 통증으로 이어질 가능성이 있다는 지적이 제기돼 왔다.
이러한 문제를 개선하기 위해 손목 움직임을 정밀하게 구현한, 여러 방향으로 움직이는 로봇 의수가 개발되고 있으나, 높은 가격에도 불구하고 사용자 맞춤 설계를 위한 명확한 기준과 객관적인 평가 체계는 아직 마련되지 않았다.
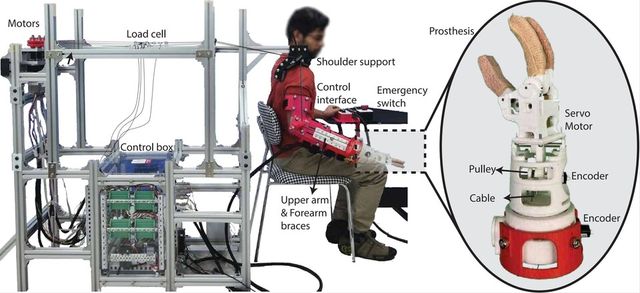
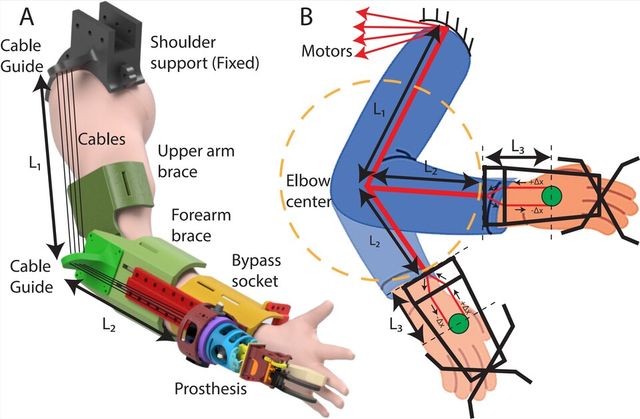
연구팀은 케이블 구동 방식을 적용해 가벼우면서 세 방향으로 움직이는 손목 기능을 구현한 로봇 기반 인공 팔 체험 시스템(I-PEDLE)을 개발했다. 케이블 모터를 외부에 배치한 구조를 통해 의수의 무게를 최소화하고 ▴손목을 안팎으로 돌리는 동작 ▴자연스러운 손목 각도 움직임 ▴물건을 잡고 쥐는 기능 등 실제 사용에 필요한 정밀한 손목 동작을 구현했다.
건강한 참가자를 대상으로 일상 동작을 수행하게 한 결과, 특정 손목 움직임 조합은 의수를 사용하기 위해 어깨를 과도하게 돌리거나 들어 올리는 등 다른 관절을 불필요하게 더 많이 사용하는 동작을 줄이는 효과가 확인됐다.
또한 연구팀은 다양한 손목 기능 조건을 동일한 환경에서 구현하고, 동작 수행 과정에서 나타나는 관절 움직임과 부족한 기능을 대신하기 위해 다른 관절을 더 많이 사용하는 동작을 센서 데이터로 수집·분석하는 방식으로 성능을 검증했다.
이를 통해 동작의 변화에 따라 달라지는 어깨와 팔꿈치 움직임을 정량적으로 평가할 수 있어, 사용자 경험에 의존하던 의수 선택 과정이 데이터 기반의 합리인 의사결정 방식으로 전환될 것으로 기대된다. 아울러 하나의 플랫폼에서 다양한 손목 구성 조건을 비교할 수 있어, 향후 사용자 맞춤형 의수 설계를 위한 평가·검증 시스템으로 활용될 것으로 전망된다.
강지연 교수는 “이번 연구는 의수 손목 설계를 사용자 중심 지표로 정량 평가할 수 있는 로봇 기반 플랫폼을 제시했다는 점에서 의미가 있다”며 “향후 개인 맞춤형 의수 설계와 인간-로봇 상호작용 기반 재활 기술 발전에 중요한 기반이 될 것”이라고 밝혔다.
향후에는 실제 상지 절단 환자를 대상으로 시스템을 검증하고, 사용자 반응을 실시간으로 반영해 최적 설계를 찾아가는 방식(Human-in-the-Loop)을 적용한 맞춤형 의수 설계 알고리즘 개발로 연구를 확장할 예정이다.
GIST AI융합학과 강지연 교수가 주도하고 미시간대학교와 뉴욕주립대학교 버팔로 연구진이 공동 수행한 이번 연구는 미국 국립과학재단(NSF) 장애·재활 공학 연구지원 프로그램(Disability and Rehabilitation Engineering program)과 과학기술정보통신부·한국연구재단 바이오의료기술개발사업 및 개인기초연구사업의 지원을 받았다.
연구 결과는 로봇공학 분야 국제학술지 ‘IEEE Robotics and Automation Letters’에 2026년 2월 13일 온라인으로 게재됐다. 한편 GIST는 이번 연구 성과가 학술적 의의와 함께 산업적 응용 가능성까지 고려한 것으로, 기술이전 관련 협의는 기술사업화실(hgmoon@gist.ac.kr)을 통해 진행할 수 있다고 밝혔다.
Copyright ⓒ AI포스트 무단 전재 및 재배포 금지
본 콘텐츠는 뉴스픽 파트너스에서 공유된 콘텐츠입니다.



