| 한스경제=이지영 기자 | 로봇 자동화 시장에서 가장 빠르게 발전하고 있는 영역 중 하나가 ‘로봇 손(Hand)’ 관련 기술이다. 로봇 손 기술은 과거 산업용 로봇이 반복 작업을 중심으로 발전해 것과 달리, 비정형 물체를 다룰 수 있는 사람의 손을 대체할 수 있는 정교한 조작 기술에 대한 수요가 증가하고 있다. 로봇 자동화 시장은 물류·조립·서비스·휴머노이드 등 적용분야가 확장되면서 단순 파지(grasping)를 넘어 조작(manipulation) 기능이 기술 경쟁력의 핵심으로 떠오르고 있다.
다만 아직까지 로봇 손 시장은 초기 단계에 머물러 있다. 다수의 로봇 손이 높은 기능성을 강조하지만, 실제론 복잡한 구조로 인해 조립·배선·유지보수의 난이도가 갈수록 높아지고 있다. 또한 양산 가능성과 품질 안전성을 확보하는 데 한계를 드러내고 있다.
이는 과거 스마트폰 시장이 초기 하드웨어 성능이 빠르게 발전했지만, 안정적인 플랫폼과 사용자 경험이 성숙되기까지 시간이 필요했던 것과 비슷하다. 로봇 손 역시 기술적 가능성은 충분하지만, 이를 실제 산업과 시장에서 지속적으로 사용하기 위한 ‘완성도 높은 구조’가 요구되고 있다.
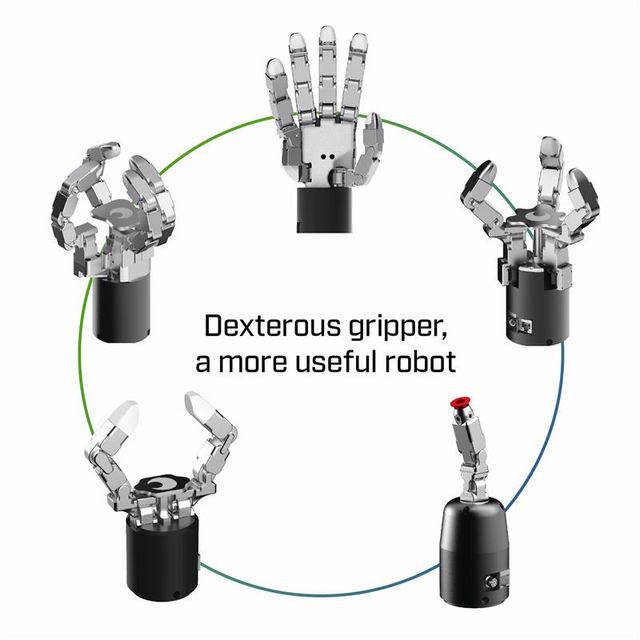
국내 로봇 손(핸드) 전문기업인 테솔로는 이 같은 전환점에서 가장 주목받고 있는 기업이다. 2019년 설립된 테솔로는 산업 자동화·물류·휴머노이드 로봇분야를 중심으로 고정밀 다관절 로봇 핸드 기술을 개발하고 있다. 특히 델토그리퍼 시리즈(DG-5F·4F·3F·2F·1F)를 중심으로 연구기관·글로벌 제조기업·로봇 플랫폼 기업 등에 고난도 파지·조작 솔루션을 공급하고 있다.
테솔로는 단순한 연구용 데모가 아닌, 실제 현장에서 반복적으로 사용할 수 있는 로봇 손을 만드는 일에 집중하고 있다. 산업현장에서 테솔로가 타 기업에 비해 차별성을 갖는 이유는 고자유도 로봇 손의 구조적 한계를 정면으로 해결하려 하고 있기 때문이다.
고자유도 로봇 손은 제한된 공간 안에 다수의 모터·감속기·링크·배선·센서를 집약해야 하는 구조적 특성을 지니고 있으며 설계는 물론 조립과 품질 관리 역시 쉽지 않다. 이에 테솔로는 이 같은 구조적 한계를 해결하기 위해 로봇 손에 최적화된 직접 구동형(Direct Drive) 액추에이터(actuator)를 자체 개발했다.
테솔로는 액추에이터간의 연결 방식을 독자적으로 설계한 다관절 로봇 핸드 구조를 만들었다. 이 구조는 조립공정은 물론 배선의 복잡함도 획기적으로 개선해 유지보수가 쉽고 양산하기도 쉽다. 게다가 정밀하고 반복성까지 뛰어나다.
이 기술은 이미 국내 특허 등록과 함께 해외 출원을 완료했으며 이를 기반으로 테솔로는 고정밀 로봇 핸드 및 델토그리퍼 시리즈를 잇달아 출시했다. 특히 지난 2024년 공개된 테솔로의 대표 제품 DG-5F를 통해 시장에서 본격적인 검증을 받고 있다.
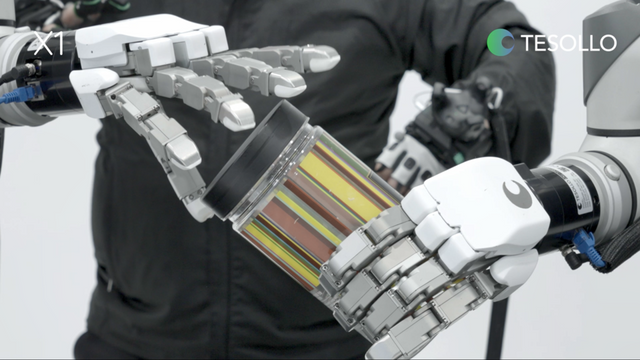
DG-5F는 5지(손가락), 20자유도(20 DoF) 구조의 휴머노이드 로봇 손으로, 각 손가락이 4개의 관절로 맞춰져 독립 구동되는 인간형 구조를 갖추고 있다. 테솔로는 이 제품을 국제 로봇학술대회(IROS)에서 처음 공개했으며, 국내 주요 기업은 물론 해외 글로벌 기업과 연구기관에 공급하며 적용 범위를 확대하고 있다. 현재 DG-5F는 전 세계 16개국에 수출되며 기술성과 시장성을 동시에 입증받았다.
이러한 경험을 바탕으로 테솔로는 최근 소형 및 경량 휴머노이드 핸드 ‘DG-5F-S’를 새롭게 공개했다. DG-5F-S는 기존 DG-5F의 핵심구조와 20개의 능동 관절을 갖춘 20자유도(20DoF) 인간형 설계를 그대로 유지하면서도, 자체 개발한 액추에이터 기술을 고도화해 무게 1kg 미만의 초경량 설계와 성인 손 크기에 가까운 콤팩트한 사이즈를 구현한 것이 특징이다.
휴머노이드 로봇 플랫폼에 탑재되는 로봇 손의 경우, 무게와 부피는 전체 시스템 설계에 직접적인 영향을 미친다. 그래서 소형화와 경량화는 상용화를 위한 핵심 조건으로 꼽힌다.
DG-5F-S는 가격 측면에서도 소비자의 접근성을 크게 높였다. 기존 DG-5F 대비 약 60% 수준으로 가격이 책정될 예정으로 그동안 비용 부담 문제로 도입을 망설였던 스타트업·연구기관·중소 및 중견 기업에게 현실적인 선택지를 제공할 예정이다. 여기에 촉각센서 통합, 방수 커버, 조작 알고리즘 커스터마이징과 같은 확장옵션을 지원해 연구 및 실험단계부터 실제 공정 적용까지 폭넓게 활용할 수 있도록 설계했다.
기술적으로는 직접 구동 방식의 메커니즘을 적용해 백래시(backlash)를 최소화했으며 뛰어난 위치 정밀도와 직관적인 제어환경을 제공한다. 또한 테솔로가 축적해 온 파지·조작 알고리즘을 통해 다양한 형상과 재질의 물체를 안정적으로 다룰 수 있다. 여기에 산업현장에서 검증된 통신 프로토콜을 지원해 실사용 편의성을 강화했다. 이는 단순히 ‘움직이는 손’이 아니라, 실제 작업을 할 수 있는 로봇 손을 지향하는 테솔로의 철학이 반영된 결과다.
테솔로의 이 같은 행보는 휴머노이드 로봇시장이 본격 성장하는 흐름과 맞물려 더욱 주목받고 있다. 글로벌 빅테크 기업과 로봇 플랫폼 기업들이 휴머노이드 로봇 개발에 속도를 내는 가운데, 테솔로의 놀라운 편의성을 갖춘 로봇 손은 전체 시스템 완성도를 좌우하는 핵심 요소로 부상하고 있다.
테솔로는 DG-5F와 DG-5F-S를 중심으로 휴머노이드 로봇의 상용화 단계로의 전환을 앞당길 수 있는 실질적인 솔루션을 제공하겠다는 전략이다.
테솔로의 김영진 대표는 “고자유도 로봇 손(핸드)은 구조적으로 매우 어려운 영역이지만, 동시에 로봇 기술의 다음 단계를 여는 핵심 분야이다”며, “테솔로는 단순한 부품 공급사가 아니라 조작 기술을 중심으로 한 로봇 손 플랫폼 기업으로 성장해 글로벌 시장에서 경쟁력을 확보해 나가겠다”고 밝혔다.
모듈기반 구조 혁신과 소형 및 경량화 기술을 동시에 추진하는 테솔로의 행보는 이제 연구 플랫폼 중심의 검증 단계를 넘어 실제 현장에서 반복운용이 가능한 로봇 손을 요구하는 시장 흐름 속에 하나의 기준점이 될 것으로 보인다.
Copyright ⓒ 한스경제 무단 전재 및 재배포 금지
본 콘텐츠는 뉴스픽 파트너스에서 공유된 콘텐츠입니다.



