
ㅣ데일리포스트=김정은 기자ㅣ농업 현장의 인력 부족이 갈수록 심각해지면서, 로봇을 활용한 자동화 기술이 하나의 해법으로 떠오르고 있다.
일본 오사카공립대학 대학원 공학연구과의 후지나가 다쿠야(藤永拓矢) 조교수는 로봇이 토마토를 '수확할 수 있는지'를 넘어, '얼마나 잘 수확할 수 있는지'를 미리 가늠하는 모델을 개발했다.
이번 연구결과는 국제학술지 'Smart Agricultural Technology'에 게재됐다.

◆ 토마토는 왜 로봇에게 어려운 작물일까
겉보기에는 단순해 보이지만, 토마토 수확은 로봇에게 결코 만만한 작업이 아니다.
자동 수확 로봇에 대한 수요는 꾸준히 늘고 있지만, 실제 농가에 적용하기까지는 넘어야 할 벽이 많다. 특히 토마토처럼 열매가 송이 형태로 달리는 작물은 상황이 더 복잡하다. 이미 익은 열매와 아직 남겨야 할 열매를 구분해야 하고, 줄기나 주변 구조물도 함께 고려해야 한다. 로봇에게는 단순히 '보는 능력'이 아니라, 상황을 읽고 판단하는 능력이 요구되는 셈이다.
여기에 수확 과정에서 열매를 손상시키지 않고 정확한 지점에 힘을 가해야 한다는 점도 난도를 높인다. 토마토는 크기와 위치, 각도가 제각각인 데다 주변 잎과 줄기에 가려져 있는 경우도 많아, 접근 방향에 따라 성공 여부가 크게 달라질 수 있다. 이런 이유로 토마토 수확은 로봇 기술의 성숙도를 가늠하는 대표적인 과제로 꼽혀왔다.
◆ 어느 방향이 더 잘 딸까…성공 확률을 미리 예측
핵심은 '수확 가능 여부'가 아니라, '성공 가능성이 얼마나 되는지'였다.
후지나가 조교수는 토마토 수확 로봇이 정면과 왼쪽, 오른쪽 가운데 어느 방향에서 접근할 때 수확 성공률이 높아지는지를 분석했다. 이미지 인식으로 얻은 정보를 통계적으로 해석해, 접근 방향에 따른 성공 가능성을 수치로 평가하는 모델을 만든 것이다.
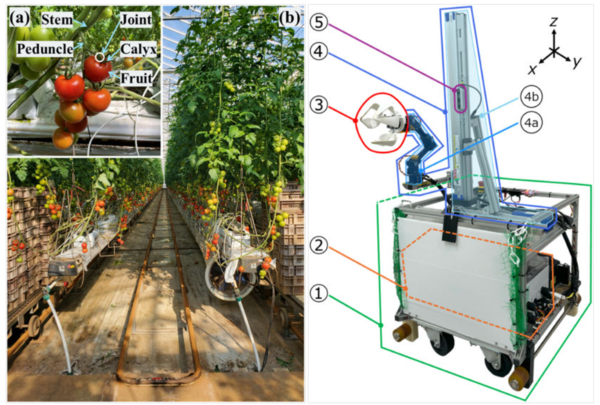
연구에 사용된 로봇은 비닐하우스형 식물공장 내부에 설치된 레일 위를 따라 이동한다. 직선으로 움직이는 두 개의 팔과, 보다 섬세한 동작이 가능한 네 개의 관절형 팔을 갖추고 있다. 팔 끝에는 세 개의 손가락으로 토마토를 집는 그리퍼가 달려 있고, 토마토와 주변 환경을 촬영하는 카메라도 함께 장착돼 있다.
실험에서는 로봇으로 100개의 토마토를 수확했으며, 이 가운데 81개를 성공적으로 따냈다. 접근 방향을 보면 정면에서 수확한 경우가 56개로 가장 많았고, 오른쪽에서 16개, 왼쪽에서 9개가 뒤를 이었다. 정면 접근에만 의존하기보다, 상황에 따라 좌우 접근을 병행할수록 전체 수확 성공률이 높아진다는 점이 확인됐다.
이 과정에서 토마토 앞에 장애물이 있으면 수확 실패 가능성이 커지고, 토마토 위쪽에 꼭지가 잘 드러나 있을수록 성공 확률이 높아진다는 경향도 확인했다. 연구에서는 이런 요소들을 로지스틱 회귀라는 통계 기법으로 분석해, 이미지 정보만으로도 수확 성공 확률을 예측할 수 있는 모델을 구축했다.
이 모델이 적용되면 로봇은 무작정 토마토를 따는 대신, 성공 가능성이 높은 열매를 골라 수확할 수 있게 된다. 보다 안정적이고 효율적인 자동 수확이 가능해지는 셈이다.
후지나가 조교수는 이번 연구가 기존처럼 토마토를 찾아내고 인식하는 것에 그치지 않고, 실제로 얼마나 쉽게 수확할 수 있는지를 판단하는 단계로 나아간 사례라고 설명했다. 그는 "이제 중요한 질문은 '로봇이 토마토를 딸 수 있느냐'가 아니라, '얼마나 높은 확률로 성공할 수 있느냐'"라며 "이런 관점이야말로 실제 농업 현장에 더 가까운 해답"이라고 말했다.
Copyright ⓒ 데일리 포스트 무단 전재 및 재배포 금지
본 콘텐츠는 뉴스픽 파트너스에서 공유된 콘텐츠입니다.



