|

한승열 UNIST 인공지능대학원 교수팀은 학습해본 적 없는 새로운 임무에도 적응하도록 AI를 훈련시키는 기법인 TAVT(Task-Aware Virtual Training)를 개발했다.
연구팀이 개발한 학습 기법은 AI 스스로 ‘가상의 임무’를 만들어 미리 학습하게 하는 방식이다. 기법은 딥러닝 기반의 표현 학습 모듈과 생성 모듈로 구성돼 있다. 표현 학습 모듈이 서로 다른 임무 간의 유사도(거리)를 정량화해 임무 구조를 파악하면 생성 모듈이 이를 조합해 새로운 가상의 임무를 만든다. 생성된 가상 임무는 원래 임무의 특징을 보존하도록 설계돼 학습한 적 없는 상황에 대한 예습 효과가 있다.
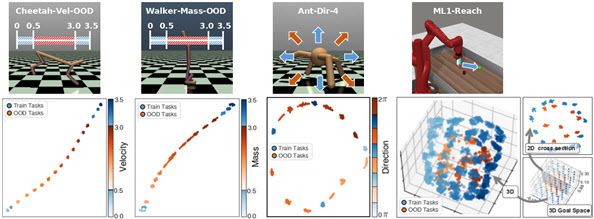
학습 기법을 치타, 개미, 2족 보행 등 다양한 로봇 시뮬레이션 환경에 적용해본 결과, 훈련하지 않은 임무에 대한 적응력이 향상되는 것으로 나타났다. 특히 치타 로봇 시뮬레이션(Cheetah-Vel-OOD) 실험에서는 TAVT 기법을 적용한 경우, 경험해 보지 못한 중간 속도에서도 목표 속도를 빠르게 파악해 안정적으로 주행을 했다. 반면 기존 메타강화학습 기법을 적용한 로봇은 적응이 느리거나 넘어지는 일이 잦았다.
한승열 교수는 “AI 에이전트의 임무 일반화 성능을 높일 수 있는 방식”이라며 “피지컬 AI 로봇이나 자율주행차·드론 등 다양한 상황에서 유연한 대응이 필수적인 분야에 폭넓게 활용될 수 있다”고 말했다.
연구 결과는 세계 3대 인공지능 학회 중 하나인 ‘2025 ICML(International Conference on Machine Learning)’에 채택됐다.
|
Copyright ⓒ 이데일리 무단 전재 및 재배포 금지
본 콘텐츠는 뉴스픽 파트너스에서 공유된 콘텐츠입니다.
다음 내용이 궁금하다면?
광고 보고 계속 읽기
원치 않을 경우 뒤로가기를 눌러주세요



