[엠투데이 임헌섭 기자] 일본 도쿄대학교와 와세다대학교 연구팀이 실험실에서 배양한 인간 근육을 활용해 18cm 크기의 바이오하이브리드 로봇 손을 제작하는 데 성공했다.
연구진은 근육 괴사 문제를 해결하기 위해 ‘다중근육조직 액추에이터(MuMuTA, multiple muscle tissue actuators)' 기술을 도입해 생체 근육 기반 로봇의 대형화 가능성을 높였다.
이전까지 바이오하이브리드 로봇의 확장은 어려운 과제로 남아 있었다. 기존 실험실 배양 근육은 수축력이 약하고, 조직이 두꺼워질 경우 내부 세포가 영양과 산소 공급 부족으로 괴사하는 문제가 발생했다.
이에 연구진은 얇은 근육 섬유를 먼저 배양한 후 이를 말아 원통형 다발로 조립하는 방식을 적용, 이를 통해 산소와 영양 공급이 원활해지며 건강한 근육 조직을 얻을 수 있었다고 설명했다.
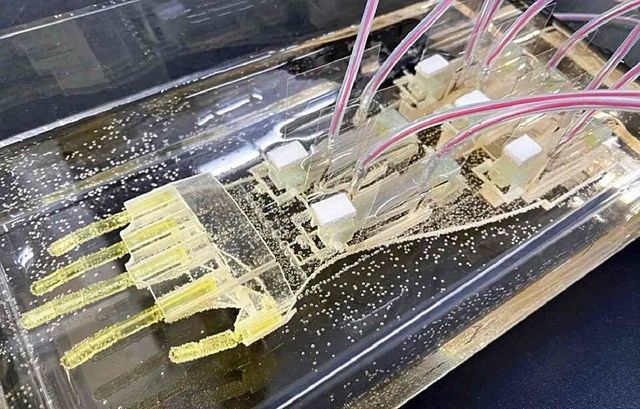
완성된 근육 다발인 MuMuTA는 전기 신호를 통해 수축하며 힘을 발휘할 수 있다. 연구진은 이 기술을 활용해 다섯 개의 MuMuTA를 로봇 손의 손가락을 움직이는 동력원으로 배치했다.
3D 프린팅된 플라스틱 구조물에 장착된 손가락은 가위·바위·보 동작을 수행하고 작은 물체를 조작할 수 있는 수준에 도달했다. 실험 결과, MuMuTA는 기존 실험실 배양 근육보다 강한 8mN의 수축력을 발휘했으며, 사용 후 펼쳐서 영양과 산소 공급을 원활히 할 수 있어 지속성도 향상됐다.
그러나 연구진은 몇 가지 한계를 지적했다. 먼저 손가락이 한 방향으로만 움직일 수 있어 복원력을 높이기 위한 추가적인 탄성 재료나 반대 근육 적용이 필요하며, 근육이 액체 환경에서만 유지될 수 있어 건조 환경에서도 작동할 수 있도록 인공 혈관 시스템 개발이 요구된다. 또한, 약 10분간 동작한 후 근육이 피로를 느껴 쉬어야 하는 문제도 있었다.
타케우치 쇼지 도쿄대 교수는 "자연 근육처럼 반복적인 운동을 통해 지구력과 힘을 키울 수 있을 것"이라며, "화학적 성장 인자를 활용한 보강 방법도 고려 중"이라고 밝혔다.
이번 연구는 바이오하이브리드 로봇 기술의 한계를 극복하는 중요한 진전을 보였으며, 향후 보다 실용적인 생체 기반 로봇 개발로 이어질 가능성을 열었다.
Copyright ⓒ M투데이 무단 전재 및 재배포 금지
본 콘텐츠는 뉴스픽 파트너스에서 공유된 콘텐츠입니다.



